OpenCV中的英特尔®IPP异步C / C ++库
目标
本教程演示了使用OpenCV 的英特尔®IPP异步C / C ++库使用。下面的代码示例说明了使用英特尔®IPP异步C / C ++功能加速的Sobel操作的实现。在这个代码示例中,cv :: hpp :: getMat和cv :: hpp :: getHpp函数用于hppiMatrix和Mat矩阵之间的数据转换。
Code
您还可以在samples/cpp/tutorial_code/core/ippasync/ippasync_sample.cppOpenCV源文件的文件中找到源代码,或从这里下载。
#include <stdio.h>
#include "opencv2/core/utility.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include "cvconfig.h"
using namespace std;
using namespace cv;
#ifdef HAVE_IPP_A
#include "opencv2/core/ippasync.hpp"
#define CHECK_STATUS(STATUS, NAME)\
if(STATUS!=HPP_STATUS_NO_ERROR){ printf("%s error %d\n", NAME, STATUS);\
if (virtMatrix) {hppStatus delSts = hppiDeleteVirtualMatrices(accel, virtMatrix); CHECK_DEL_STATUS(delSts,"hppiDeleteVirtualMatrices");}\
if (accel) {hppStatus delSts = hppDeleteInstance(accel); CHECK_DEL_STATUS(delSts, "hppDeleteInstance");}\
return -1;}
#define CHECK_DEL_STATUS(STATUS, NAME)\
if(STATUS!=HPP_STATUS_NO_ERROR){ printf("%s error %d\n", NAME, STATUS); return -1;}
#endif
static void help()
{
printf("\nThis program shows how to use the conversion for IPP Async.\n"
"This example uses the Sobel filter.\n"
"You can use cv::Sobel or hppiSobel.\n"
"Usage: \n"
"./ipp_async_sobel [--camera]=<use camera,if this key is present>, \n"
" [--file_name]=<path to movie or image file>\n"
" [--accel]=<accelerator type: auto (default), cpu, gpu>\n\n");
}
const char* keys =
{
"{c camera | | use camera or not}"
"{fn file_name|../data/baboon.jpg | image file }"
"{a accel |auto | accelerator type: auto (default), cpu, gpu}"
};
//this is a sample for hppiSobel functions
int main(int argc, const char** argv)
{
help();
VideoCapture cap;
CommandLineParser parser(argc, argv, keys);
Mat image, gray, result;
#ifdef HAVE_IPP_A
hppiMatrix* src,* dst;
hppAccel accel = 0;
hppAccelType accelType;
hppStatus sts;
hppiVirtualMatrix * virtMatrix;
bool useCamera = parser.has("camera");
string file = parser.get<string>("file_name");
string sAccel = parser.get<string>("accel");
parser.printMessage();
if( useCamera )
{
printf("used camera\n");
cap.open(0);
}
else
{
printf("used image %s\n", file.c_str());
cap.open(file.c_str());
}
if( !cap.isOpened() )
{
printf("can not open camera or video file\n");
return -1;
}
accelType = sAccel == "cpu" ? HPP_ACCEL_TYPE_CPU:
sAccel == "gpu" ? HPP_ACCEL_TYPE_GPU:
HPP_ACCEL_TYPE_ANY;
//Create accelerator instance
sts = hppCreateInstance(accelType, 0, &accel);
CHECK_STATUS(sts, "hppCreateInstance");
accelType = hppQueryAccelType(accel);
sAccel = accelType == HPP_ACCEL_TYPE_CPU ? "cpu":
accelType == HPP_ACCEL_TYPE_GPU ? "gpu":
accelType == HPP_ACCEL_TYPE_GPU_VIA_DX9 ? "gpu dx9": "?";
printf("accelType %s\n", sAccel.c_str());
virtMatrix = hppiCreateVirtualMatrices(accel, 1);
for(;;)
{
cap >> image;
if(image.empty())
break;
cvtColor( image, gray, COLOR_BGR2GRAY );
result.create( image.rows, image.cols, CV_8U);
double execTime = (double)getTickCount();
//convert Mat to hppiMatrix
src = hpp::getHpp(gray,accel);
dst = hpp::getHpp(result,accel);
sts = hppiSobel(accel,src, HPP_MASK_SIZE_3X3,HPP_NORM_L1,virtMatrix[0]);
CHECK_STATUS(sts,"hppiSobel");
sts = hppiConvert(accel, virtMatrix[0], 0, HPP_RND_MODE_NEAR, dst, HPP_DATA_TYPE_8U);
CHECK_STATUS(sts,"hppiConvert");
// Wait for tasks to complete
sts = hppWait(accel, HPP_TIME_OUT_INFINITE);
CHECK_STATUS(sts, "hppWait");
execTime = ((double)getTickCount() - execTime)*1000./getTickFrequency();
printf("Time : %0.3fms\n", execTime);
imshow("image", image);
imshow("rez", result);
waitKey(15);
sts = hppiFreeMatrix(src);
CHECK_DEL_STATUS(sts,"hppiFreeMatrix");
sts = hppiFreeMatrix(dst);
CHECK_DEL_STATUS(sts,"hppiFreeMatrix");
}
if (!useCamera)
waitKey(0);
if (virtMatrix)
{
sts = hppiDeleteVirtualMatrices(accel, virtMatrix);
CHECK_DEL_STATUS(sts,"hppiDeleteVirtualMatrices");
}
if (accel)
{
sts = hppDeleteInstance(accel);
CHECK_DEL_STATUS(sts, "hppDeleteInstance");
}
printf("SUCCESS\n");
#else
printf("IPP Async not supported\n");
#endif
return 0;
}说明
- 为OpenCV创建参数:
VideoCapture cap;
Mat image, gray, result;和IPP异步:
hppiMatrix* src,* dst;
hppAccel accel = 0;
hppAccelType accelType;
hppStatus sts;
hppiVirtualMatrix * virtMatrix;- 加载输入图像或视频。如何打开和读取视频流,您可以在视频输入中使用OpenCV和相似度测量教程。
if( useCamera )
{
printf("used camera\n");
cap.open(0);
}
else
{
printf("used image %s\n", file.c_str());
cap.open(file.c_str());
}
if( !cap.isOpened() )
{
printf("can not open camera or video file\n");
return -1;
}- 使用hppCreateInstance创建加速器实例:
accelType = sAccel == "cpu" ? HPP_ACCEL_TYPE_CPU:
sAccel == "gpu" ? HPP_ACCEL_TYPE_GPU:
HPP_ACCEL_TYPE_ANY;
//Create accelerator instance
sts = hppCreateInstance(accelType, 0, &accel);
CHECK_STATUS(sts, "hppCreateInstance");- 使用hppiCreateVirtualMatrices函数创建一个虚拟矩阵数组。
virtMatrix = hppiCreateVirtualMatrices(accel,1);
- 为输入和输出数据准备一个矩阵:
cap >> image;
if(image.empty())
break;
cvtColor( image, gray, COLOR_BGR2GRAY );
result.create( image.rows, image.cols, CV_8U);- 使用cv :: hpp :: getHpp将Mat转换为hppiMatrix并调用hppiSobel函数。
//convert Mat to hppiMatrix
src = getHpp(gray, accel);
dst = getHpp(result, accel);
sts = hppiSobel(accel,src, HPP_MASK_SIZE_3X3,HPP_NORM_L1,virtMatrix[0]);
CHECK_STATUS(sts,"hppiSobel");
sts = hppiConvert(accel, virtMatrix[0], 0, HPP_RND_MODE_NEAR, dst, HPP_DATA_TYPE_8U);
CHECK_STATUS(sts,"hppiConvert");
// Wait for tasks to complete
sts = hppWait(accel, HPP_TIME_OUT_INFINITE);
CHECK_STATUS(sts, "hppWait");我们使用hppiConvert,因为hppiSobel返回具有HPP_DATA_TYPE_8U类型的源矩阵的HPP_DATA_TYPE_16S数据类型的目标矩阵。每次调用IPP异步函数后,应该检查hppStatus。
- 创建窗口并显示图像,通常的方式。
imshow("image", image);
imshow("rez", result);
waitKey(15);- 删除hpp矩阵。
sts = hppiFreeMatrix(src);
CHECK_DEL_STATUS(sts,“hppiFreeMatrix”);
sts = hppiFreeMatrix(dst);
CHECK_DEL_STATUS(sts,“hppiFreeMatrix”);- 删除虚拟矩阵和加速器实例。
if (virtMatrix)
{
sts = hppiDeleteVirtualMatrices(accel, virtMatrix);
CHECK_DEL_STATUS(sts,"hppiDeleteVirtualMatrices");
}
if (accel)
{
sts = hppDeleteInstance(accel);
CHECK_DEL_STATUS(sts, "hppDeleteInstance");
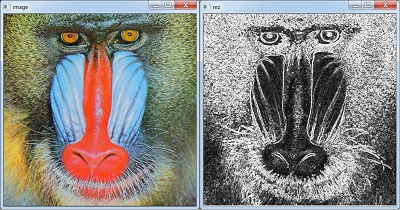
}结果
在编译上面的代码之后,我们可以执行它,给出图像或视频路径和加速器类型作为参数。对于本教程,我们使用baboon.png图像作为输入。结果如下。