
OpenCV模板匹配
目标
在本教程中,您将学习如何:
- 使用OpenCV功能matchTemplate()来搜索图像补丁和输入图像之间的匹配
- 使用OpenCV函数minMaxLoc()来查找给定数组中的最大值和最小值(以及它们的位置)。
理论
什么是模板匹配?
模板匹配是一种用于查找与模板图像(补丁)匹配(类似)的图像区域的技术。
虽然补丁必须是一个矩形,可能并不是所有的矩形都是相关的。在这种情况下,可以使用掩模来隔离应该用于找到匹配的补丁部分。
它是如何工作的?
- 我们需要两个主要组件:
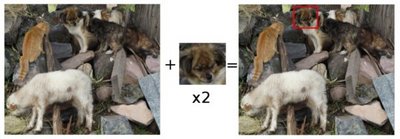
- 源图像(I):我们期望找到与模板图像匹配的图像
- 模板图像(T):将与模板图像进行比较的补丁图像
我们的目标是检测最匹配的区域:
- 要识别匹配区域,我们必须通过滑动来比较模板图像与源图像:

- 通过滑动,我们的意思是一次移动补丁一个像素(从左到右,从上到下)。在每个位置,计算度量,以便它表示在该位置处的匹配的“好”还是“坏”(或者与图像的特定区域相似)。
对于T的每个位置超过I,则存储在该度量结果矩阵 R 。R中的每个位置(x,y)都包含匹配度量

上面的图片是一个度量tm_ccorr_normed滑动补丁结果R。最亮的位置表示最高匹配。如您所见,红色圆圈标记的位置可能是具有最高值的位置,因此这个位置(由点形成的矩形,角度和宽度和高度等于补丁图像)被认为是匹配。
- 实际上,我们使用函数minMaxLoc()定位R矩阵中最高的值(或更低的取决于匹配方法的类型)
mask是如何工作的?
- 如果匹配需要屏蔽,则需要三个组件:
- 源图像(I):我们期望找到与模板图像匹配的图像
- 模板图像(T):将与模板图像进行比较的补丁图像
- 掩模图像(M):The mask,屏蔽模板的灰度图像
- 目前只有两种匹配方法接受掩码:CV_TM_SQDIFF和CV_TM_CCORR_NORMED(有关opencv中可用的所有匹配方法的说明,请参见下文)。
- The mask必须与模板尺寸相同
- The mask应具有CV_8U或CV_32F深度和与模板图像相同数量的通道。在CV_8U情况下,The mask值被视为二进制,即零和非零。在CV_32F情况下,值应该落在[0..1]范围内,并且模板像素将乘以相应的The mask像素值。由于样本中的输入图像具有CV_8UC3类型,因此屏蔽也被读取为彩色图像。

OpenCV中可以使用哪些匹配方法?
OpenCV在函数matchTemplate()中实现模板匹配。可用的方法有以上6种:
- method=CV_TM_SQDIFF

- method=CV_TM_SQDIFF_NORMED

- method=CV_TM_CCORR

- method=CV_TM_CCORR_NORMED

- method=CV_TM_CCOEFF

where

- method=CV_TM_CCOEFF_NORMED

Code
C ++
这个程序是做什么的?
- 加载输入图像,图像补丁(模板)和可选的mask
- 使用OpenCV函数matchTemplate()与之前描述的6种匹配方法中的任何一种执行模板匹配过程。用户可以通过在轨迹栏中输入其选择来选择该方法。如果提供了一个mask,它只会用于支持mask的方法
- 规范匹配过程的输出
- 以较高的匹配概率来定位位置
- 在与最高匹配相对应的区域周围绘制一个矩形
- 可下载的代码:点击这里
- 代码一览:
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/imgproc.hpp"
#include <iostream>
using namespace std;
using namespace cv;
bool use_mask;
Mat img; Mat templ; Mat mask; Mat result;
const char* image_window = "Source Image";
const char* result_window = "Result window";
int match_method;
int max_Trackbar = 5;
void MatchingMethod( int, void* );
int main( int argc, char** argv )
{
if (argc < 3)
{
cout << "Not enough parameters" << endl;
cout << "Usage:\n./MatchTemplate_Demo <image_name> <template_name> [<mask_name>]" << endl;
return -1;
}
img = imread( argv[1], IMREAD_COLOR );
templ = imread( argv[2], IMREAD_COLOR );
if(argc > 3) {
use_mask = true;
mask = imread( argv[3], IMREAD_COLOR );
}
if(img.empty() || templ.empty() || (use_mask && mask.empty()))
{
cout << "Can't read one of the images" << endl;
return -1;
}
namedWindow( image_window, WINDOW_AUTOSIZE );
namedWindow( result_window, WINDOW_AUTOSIZE );
const char* trackbar_label = "Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED";
createTrackbar( trackbar_label, image_window, &match_method, max_Trackbar, MatchingMethod );
MatchingMethod( 0, 0 );
waitKey(0);
return 0;
}
void MatchingMethod( int, void* )
{
Mat img_display;
img.copyTo( img_display );
int result_cols = img.cols - templ.cols + 1;
int result_rows = img.rows - templ.rows + 1;
result.create( result_rows, result_cols, CV_32FC1 );
bool method_accepts_mask = (CV_TM_SQDIFF == match_method || match_method == CV_TM_CCORR_NORMED);
if (use_mask && method_accepts_mask)
{ matchTemplate( img, templ, result, match_method, mask); }
else
{ matchTemplate( img, templ, result, match_method); }
normalize( result, result, 0, 1, NORM_MINMAX, -1, Mat() );
double minVal; double maxVal; Point minLoc; Point maxLoc;
Point matchLoc;
minMaxLoc( result, &minVal, &maxVal, &minLoc, &maxLoc, Mat() );
if( match_method == TM_SQDIFF || match_method == TM_SQDIFF_NORMED )
{ matchLoc = minLoc; }
else
{ matchLoc = maxLoc; }
rectangle( img_display, matchLoc, Point( matchLoc.x + templ.cols , matchLoc.y + templ.rows ), Scalar::all(0), 2, 8, 0 );
rectangle( result, matchLoc, Point( matchLoc.x + templ.cols , matchLoc.y + templ.rows ), Scalar::all(0), 2, 8, 0 );
imshow( image_window, img_display );
imshow( result_window, result );
return;
}代码说明
- 声明一些全局变量,如图像,模板和结果矩阵,以及匹配方法和窗口名称:
bool use_mask;
Mat img; Mat templ; Mat mask; Mat result;
const char* image_window = "Source Image";
const char* result_window = "Result window";
int match_method;
int max_Trackbar = 5;- 加载源图像,模板,可选地,如果匹配方法支持,则使用mask:
img = imread( argv[1], IMREAD_COLOR );
templ = imread( argv[2], IMREAD_COLOR );
if(argc > 3) {
use_mask = true;
mask = imread( argv[3], IMREAD_COLOR );
}
if(img.empty() || templ.empty() || (use_mask && mask.empty()))
{
cout << "Can't read one of the images" << endl;
return -1;
}- 创建跟踪栏以输入要使用的匹配方法。当检测到更改时,调用回调函数。
const char* trackbar_label = "Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED";
createTrackbar( trackbar_label, image_window, &match_method, max_Trackbar, MatchingMethod );- 我们来看看回调函数。首先,它创建源图像的副本:
Mat img_display;
img.copyTo( img_display );- 执行模板匹配操作。的参数是自然输入图像我,模板T,结果ř和match_method(由给定的TrackBar),和任选的掩模图像中号。
bool method_accepts_mask = (CV_TM_SQDIFF == match_method || match_method == CV_TM_CCORR_NORMED);
if (use_mask && method_accepts_mask)
{ matchTemplate( img, templ, result, match_method, mask); }
else
{ matchTemplate( img, templ, result, match_method); }- 我们对结果进行归一化:
normalize( result, result, 0, 1, NORM_MINMAX, -1, Mat() );
- 我们使用minMaxLoc()定位结果矩阵R中的最小值和最大值。
double minVal; double maxVal; Point minLoc; Point maxLoc;
Point matchLoc;
minMaxLoc( result, &minVal, &maxVal, &minLoc, &maxLoc, Mat() )- 对于前两种方法(TM_SQDIFF和MT_SQDIFF_NORMED),最佳匹配是最低值。对于所有其他的,更高的值表示更好的匹配。所以我们把对应的值保存在matchLoc变量中:
if( match_method == TM_SQDIFF || match_method == TM_SQDIFF_NORMED )
{ matchLoc = minLoc; }
else
{ matchLoc = maxLoc; }- 显示源图像和结果矩阵。在最高可能的匹配区域周围绘制一个矩形:
rectangle( img_display, matchLoc, Point( matchLoc.x + templ.cols , matchLoc.y + templ.rows ), Scalar::all(0), 2, 8, 0 );
rectangle( result, matchLoc, Point( matchLoc.x + templ.cols , matchLoc.y + templ.rows ), Scalar::all(0), 2, 8, 0 );
imshow( image_window, img_display );
imshow( result_window, result );Java代码一览
import org.opencv.core.*;
import org.opencv.core.Point;
import org.opencv.imgcodecs.Imgcodecs;
import org.opencv.imgproc.Imgproc;
import javax.swing.*;
import javax.swing.event.ChangeEvent;
import javax.swing.event.ChangeListener;
import java.awt.*;
import java.awt.image.BufferedImage;
import java.awt.image.DataBufferByte;
import java.util.*;
class MatchTemplateDemoRun implements ChangeListener{
Boolean use_mask = false;
Mat img = new Mat(), templ = new Mat();
Mat mask = new Mat();
int match_method;
JLabel imgDisplay = new JLabel(), resultDisplay = new JLabel();
public void run(String[] args) {
if (args.length < 2)
{
System.out.println("Not enough parameters");
System.out.println("Program arguments:\n<image_name> <template_name> [<mask_name>]");
System.exit(-1);
}
img = Imgcodecs.imread( args[0], Imgcodecs.IMREAD_COLOR );
templ = Imgcodecs.imread( args[1], Imgcodecs.IMREAD_COLOR );
if(args.length > 2) {
use_mask = true;
mask = Imgcodecs.imread( args[2], Imgcodecs.IMREAD_COLOR );
}
if(img.empty() || templ.empty() || (use_mask && mask.empty()))
{
System.out.println("Can't read one of the images");
System.exit(-1);
}
matchingMethod();
createJFrame();
}
private void matchingMethod() {
Mat result = new Mat();
Mat img_display = new Mat();
img.copyTo( img_display );
int result_cols = img.cols() - templ.cols() + 1;
int result_rows = img.rows() - templ.rows() + 1;
result.create( result_rows, result_cols, CvType.CV_32FC1 );
Boolean method_accepts_mask = (Imgproc.TM_SQDIFF == match_method ||
match_method == Imgproc.TM_CCORR_NORMED);
if (use_mask && method_accepts_mask)
{ Imgproc.matchTemplate( img, templ, result, match_method, mask); }
else
{ Imgproc.matchTemplate( img, templ, result, match_method); }
Core.normalize( result, result, 0, 1, Core.NORM_MINMAX, -1, new Mat() );
double minVal; double maxVal;
Point matchLoc;
Core.MinMaxLocResult mmr = Core.minMaxLoc( result );
// For all the other methods, the higher the better
if( match_method == Imgproc.TM_SQDIFF || match_method == Imgproc.TM_SQDIFF_NORMED )
{ matchLoc = mmr.minLoc; }
else
{ matchLoc = mmr.maxLoc; }
Imgproc.rectangle(img_display, matchLoc, new Point(matchLoc.x + templ.cols(),
matchLoc.y + templ.rows()), new Scalar(0, 0, 0), 2, 8, 0);
Imgproc.rectangle(result, matchLoc, new Point(matchLoc.x + templ.cols(),
matchLoc.y + templ.rows()), new Scalar(0, 0, 0), 2, 8, 0);
Image tmpImg = toBufferedImage(img_display);
ImageIcon icon = new ImageIcon(tmpImg);
imgDisplay.setIcon(icon);
result.convertTo(result, CvType.CV_8UC1, 255.0);
tmpImg = toBufferedImage(result);
icon = new ImageIcon(tmpImg);
resultDisplay.setIcon(icon);
}
public void stateChanged(ChangeEvent e) {
JSlider source = (JSlider) e.getSource();
if (!source.getValueIsAdjusting()) {
match_method = (int)source.getValue();
matchingMethod();
}
}
public Image toBufferedImage(Mat m) {
int type = BufferedImage.TYPE_BYTE_GRAY;
if ( m.channels() > 1 ) {
type = BufferedImage.TYPE_3BYTE_BGR;
}
int bufferSize = m.channels()*m.cols()*m.rows();
byte [] b = new byte[bufferSize];
m.get(0,0,b); // get all the pixels
BufferedImage image = new BufferedImage(m.cols(),m.rows(), type);
final byte[] targetPixels = ((DataBufferByte) image.getRaster().getDataBuffer()).getData();
System.arraycopy(b, 0, targetPixels, 0, b.length);
return image;
}
private void createJFrame() {
String title = "Source image; Control; Result image";
JFrame frame = new JFrame(title);
frame.setLayout(new GridLayout(2, 2));
frame.add(imgDisplay);
int min = 0, max = 5;
JSlider slider = new JSlider(JSlider.VERTICAL, min, max, match_method);
slider.setPaintTicks(true);
slider.setPaintLabels(true);
// Set the spacing for the minor tick mark
slider.setMinorTickSpacing(1);
// Customizing the labels
Hashtable labelTable = new Hashtable();
labelTable.put( new Integer( 0 ), new JLabel("0 - SQDIFF") );
labelTable.put( new Integer( 1 ), new JLabel("1 - SQDIFF NORMED") );
labelTable.put( new Integer( 2 ), new JLabel("2 - TM CCORR") );
labelTable.put( new Integer( 3 ), new JLabel("3 - TM CCORR NORMED") );
labelTable.put( new Integer( 4 ), new JLabel("4 - TM COEFF") );
labelTable.put( new Integer( 5 ), new JLabel("5 - TM COEFF NORMED : (Method)") );
slider.setLabelTable( labelTable );
slider.addChangeListener(this);
frame.add(slider);
frame.add(resultDisplay);
frame.setDefaultCloseOperation(JFrame.EXIT_ON_CLOSE);
frame.pack();
frame.setVisible(true);
}
}
public class MatchTemplateDemo
{
public static void main(String[] args) {
// load the native OpenCV library
System.loadLibrary(Core.NATIVE_LIBRARY_NAME);
// run code
new MatchTemplateDemoRun().run(args);
}
}代码说明
代码说明
- 声明一些全局变量,如图像,模板和结果矩阵,以及匹配方法和窗口名称:
Boolean use_mask = false;
Mat img = new Mat(), templ = new Mat();
Mat mask = new Mat();
int match_method;
JLabel imgDisplay = new JLabel(), resultDisplay = new JLabel();- 加载源图像,模板,可选地,如果匹配方法支持,则使用mask:
img = Imgcodecs.imread( args[0], Imgcodecs.IMREAD_COLOR );
templ = Imgcodecs.imread( args[1], Imgcodecs.IMREAD_COLOR );- 创建跟踪栏以输入要使用的匹配方法。当检测到更改时,调用回调函数。
int min = 0, max = 5;
JSlider slider = new JSlider(JSlider.VERTICAL, min, max, match_method);- 我们来看看回调函数。首先,它创建源图像的副本:
Mat img_display = new Mat();
img.copyTo( img_display );- 执行模板匹配操作。的参数是自然输入图像我,模板T,结果ř和match_method(由给定的TrackBar),和任选的掩模图像中号。
Boolean method_accepts_mask = (Imgproc.TM_SQDIFF == match_method ||
match_method == Imgproc.TM_CCORR_NORMED);
if (use_mask && method_accepts_mask)
{ Imgproc.matchTemplate( img, templ, result, match_method, mask); }
else
{ Imgproc.matchTemplate( img, templ, result, match_method); }- 我们对结果进行归一化:
Core.normalize( result, result, 0, 1, Core.NORM_MINMAX, -1, new Mat() );
- 我们使用minMaxLoc()定位结果矩阵R中的最小值和最大值。
double minVal; double maxVal;
Point matchLoc;
Core.MinMaxLocResult mmr = Core.minMaxLoc( result );- 对于前两种方法(TM_SQDIFF和MT_SQDIFF_NORMED),最佳匹配是最低值。对于所有其他的,更高的值表示更好的匹配。所以我们把对应的值保存在matchLoc变量中:
// For all the other methods, the higher the better
if( match_method == Imgproc.TM_SQDIFF || match_method == Imgproc.TM_SQDIFF_NORMED )
{ matchLoc = mmr.minLoc; }
else
{ matchLoc = mmr.maxLoc; }- 显示源图像和结果矩阵。在最高可能的匹配区域周围绘制一个矩形:
Imgproc.rectangle(img_display, matchLoc, new Point(matchLoc.x + templ.cols(),
matchLoc.y + templ.rows()), new Scalar(0, 0, 0), 2, 8, 0);
Imgproc.rectangle(result, matchLoc, new Point(matchLoc.x + templ.cols(),
matchLoc.y + templ.rows()), new Scalar(0, 0, 0), 2, 8, 0);
Image tmpImg = toBufferedImage(img_display);
ImageIcon icon = new ImageIcon(tmpImg);
imgDisplay.setIcon(icon);
result.convertTo(result, CvType.CV_8UC1, 255.0);
tmpImg = toBufferedImage(result);
icon = new ImageIcon(tmpImg);
resultDisplay.setIcon(icon);Python代码一览
import sys
import cv2
use_mask = False
img = None
templ = None
mask = None
image_window = "Source Image"
result_window = "Result window"
match_method = 0
max_Trackbar = 5
def main(argv):
if (len(sys.argv) < 3):
print 'Not enough parameters'
print 'Usage:\nmatch_template_demo.py <image_name> <template_name> [<mask_name>]'
return -1
global img
global templ
img = cv2.imread(sys.argv[1], cv2.IMREAD_COLOR)
templ = cv2.imread(sys.argv[2], cv2.IMREAD_COLOR)
if (len(sys.argv) > 3):
global use_mask
use_mask = True
global mask
mask = cv2.imread( sys.argv[3], cv2.IMREAD_COLOR )
if ((img is None) or (templ is None) or (use_mask and (mask is None))):
print 'Can\'t read one of the images'
return -1
cv2.namedWindow( image_window, cv2.WINDOW_AUTOSIZE )
cv2.namedWindow( result_window, cv2.WINDOW_AUTOSIZE )
trackbar_label = 'Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED'
cv2.createTrackbar( trackbar_label, image_window, match_method, max_Trackbar, MatchingMethod )
MatchingMethod(match_method)
cv2.waitKey(0)
return 0
def MatchingMethod(param):
global match_method
match_method = param
img_display = img.copy()
method_accepts_mask = (cv2.TM_SQDIFF == match_method or match_method == cv2.TM_CCORR_NORMED)
if (use_mask and method_accepts_mask):
result = cv2.matchTemplate(img, templ, match_method, None, mask)
else:
result = cv2.matchTemplate(img, templ, match_method)
cv2.normalize( result, result, 0, 1, cv2.NORM_MINMAX, -1 )
_minVal, _maxVal, minLoc, maxLoc = cv2.minMaxLoc(result, None)
if (match_method == cv2.TM_SQDIFF or match_method == cv2.TM_SQDIFF_NORMED):
matchLoc = minLoc
else:
matchLoc = maxLoc
cv2.rectangle(img_display, matchLoc, (matchLoc[0] + templ.shape[0], matchLoc[1] + templ.shape[1]), (0,0,0), 2, 8, 0 )
cv2.rectangle(result, matchLoc, (matchLoc[0] + templ.shape[0], matchLoc[1] + templ.shape[1]), (0,0,0), 2, 8, 0 )
cv2.imshow(image_window, img_display)
cv2.imshow(result_window, result)
pass
if __name__ == "__main__":
main(sys.argv[1:])代码说明
- 声明一些全局变量,如图像,模板和结果矩阵,以及匹配方法和窗口名称:
use_mask = False
img = None
templ = None
mask = None
image_window = "Source Image"
result_window = "Result window"
match_method = 0
max_Trackbar = 5- 加载源图像,模板,可选地,如果匹配方法支持,则使用mask:
global img
global templ
img = cv2.imread(sys.argv[1], cv2.IMREAD_COLOR)
templ = cv2.imread(sys.argv[2], cv2.IMREAD_COLOR)
if (len(sys.argv) > 3):
global use_mask
use_mask = True
global mask
mask = cv2.imread( sys.argv[3], cv2.IMREAD_COLOR )
if ((img is None) or (templ is None) or (use_mask and (mask is None))):
print 'Can\'t read one of the images'
return -1- 创建跟踪栏以输入要使用的匹配方法。当检测到更改时,调用回调函数。
trackbar_label = 'Method: \n 0: SQDIFF \n 1: SQDIFF NORMED \n 2: TM CCORR \n 3: TM CCORR NORMED \n 4: TM COEFF \n 5: TM COEFF NORMED'
cv2.createTrackbar( trackbar_label, image_window, match_method, max_Trackbar, MatchingMethod )- 我们来看看回调函数。首先,它创建源图像的副本:
img_display = img.copy()- 执行模板匹配操作。的参数是自然输入图像我,模板T,结果ř和match_method(由给定的TrackBar),和任选的掩模图像中号。
method_accepts_mask = (cv2.TM_SQDIFF == match_method or match_method == cv2.TM_CCORR_NORMED)
if (use_mask and method_accepts_mask):
result = cv2.matchTemplate(img, templ, match_method, None, mask)
else:
result = cv2.matchTemplate(img, templ, match_method)- 我们对结果进行归一化:
cv2.normalize( result, result, 0, 1, cv2.NORM_MINMAX, -1 )
- 我们使用minMaxLoc()定位结果矩阵R中的最小值和最大值。
_minVal, _maxVal, minLoc, maxLoc = cv2.minMaxLoc(result, None)
- 对于前两种方法(TM_SQDIFF和MT_SQDIFF_NORMED),最佳匹配是最低值。对于所有其他的,更高的值表示更好的匹配。所以我们把对应的值保存在matchLoc变量中:
if (match_method == cv2.TM_SQDIFF or match_method == cv2.TM_SQDIFF_NORMED):
matchLoc = minLoc
else:
matchLoc = maxLoc- 显示源图像和结果矩阵。在最高可能的匹配区域周围绘制一个矩形:
cv2.rectangle(img_display, matchLoc, (matchLoc[0] + templ.shape[0], matchLoc[1] + templ.shape[1]), (0,0,0), 2, 8, 0 )
cv2.rectangle(result, matchLoc, (matchLoc[0] + templ.shape[0], matchLoc[1] + templ.shape[1]), (0,0,0), 2, 8, 0 )
cv2.imshow(image_window, img_display)
cv2.imshow(result_window, result)结果
- 使用输入图像测试我们的程序,如:

和模板图片:

- 生成以下结果矩阵(第一行是标准方法SQDIFF,CCORR和CCOEFF,第二行在其标准化版本中是相同的方法)。在第一列中,最黑暗的是更好的匹配,对于另外两列,位置越亮,匹配越高。

RESULT_0

Result_1
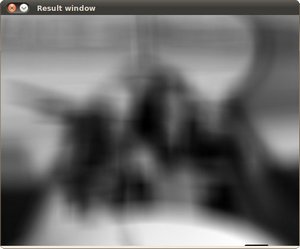
Result_2
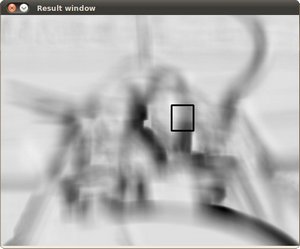
Result_3
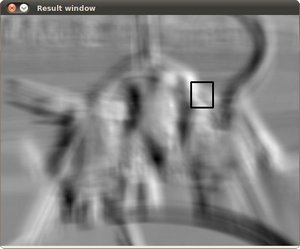
Result_4

Result_5
正确的匹配如下所示(黑色矩形在右边的家伙的脸上)。请注意,CCORR和CCDEFF给出了错误的最佳匹配,但是它们的正常版本是正确的,这可能是因为我们只考虑“最高匹配”,而不是其他可能的高匹配。
